This morning, at 7:30 a.m. we held a meeting to thank our sponsors, and we had an opportunity to show them the robot they’ve helped us build. Those who have donated have been a great assistance to the team.
As the day progressed, we began to plan out our trip to Houston. This included dates, times, hotels, and food.
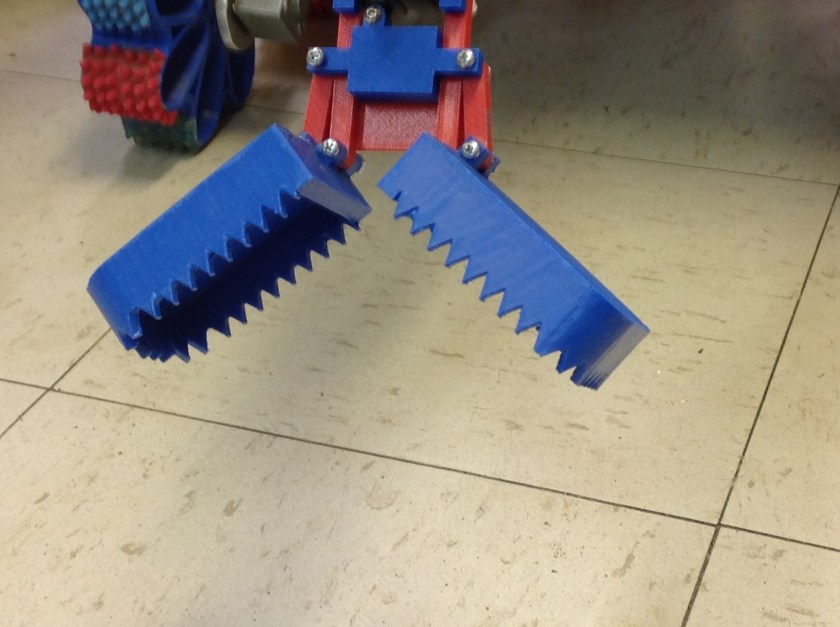
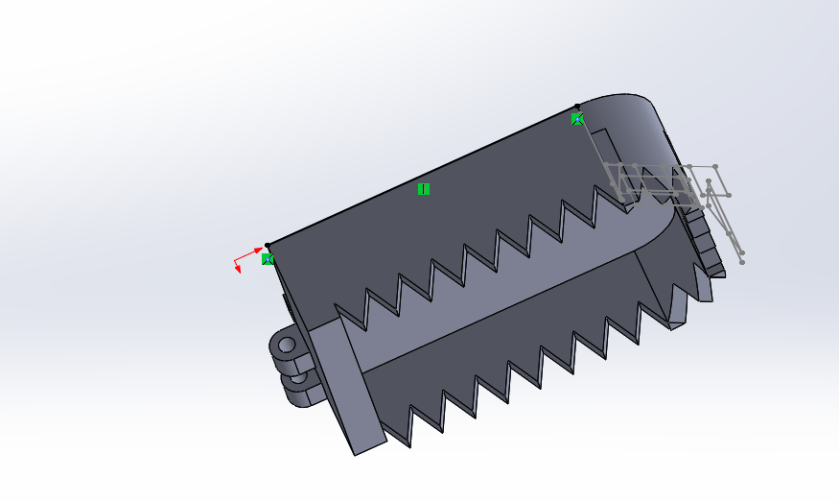
In our Mars Yard Readiness Review (or M.Y.R.R.), we made a few updates to the information about the hand, the functional block diagram, and the programming.
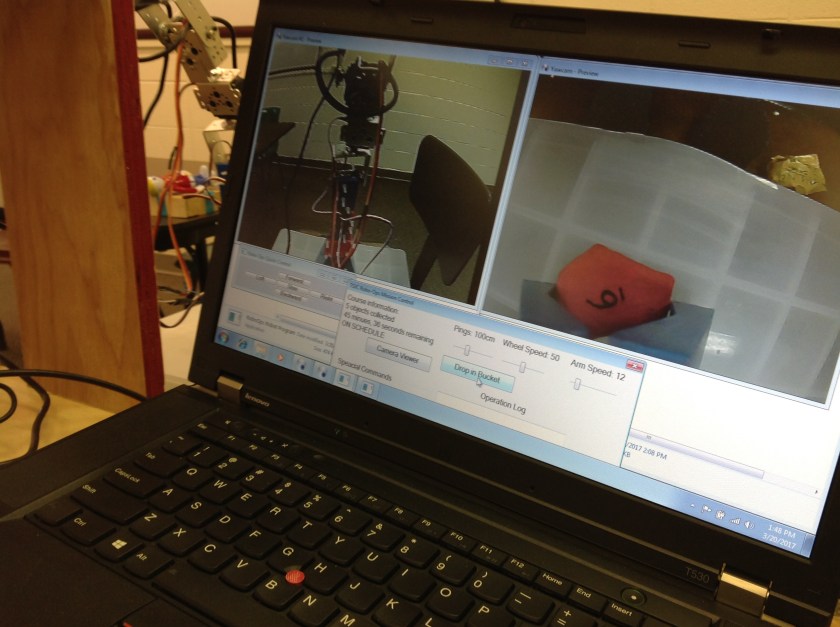
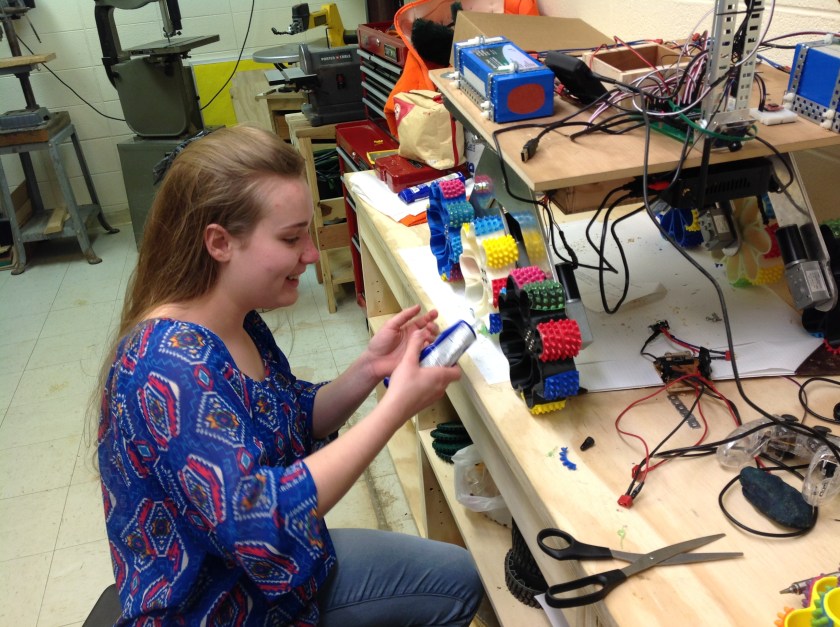
We also made sure to get more practice in operating the robot. We had a chance to test out a few changes in the mission control software that would improve operating efficiency. However, C.L.O.E.E. had a bit of a “stroke.” Her board overheated, and that caused the entire left side of wheels to stop moving, so we had to solder some connections back together to get her working again. Here’s a picture of the board.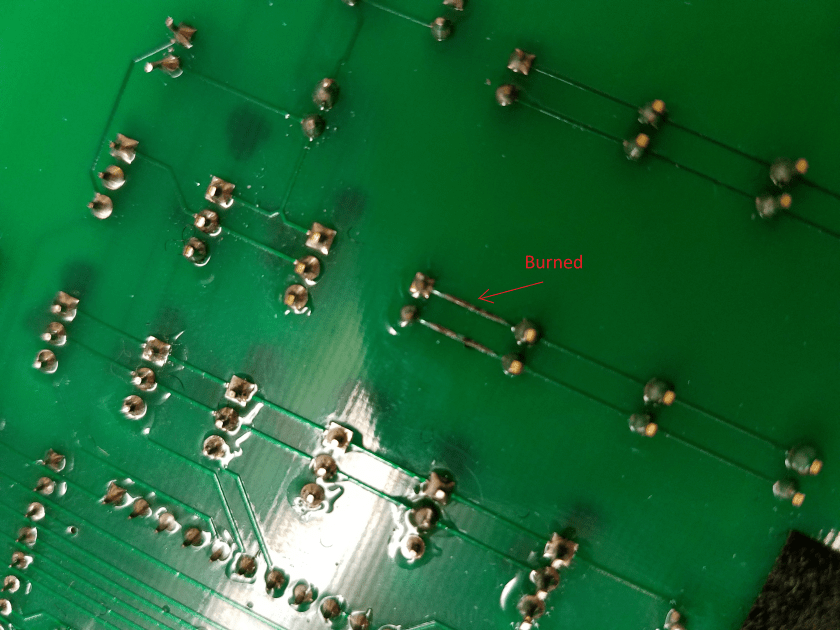
After we got that fixed, the testing continued successfully.
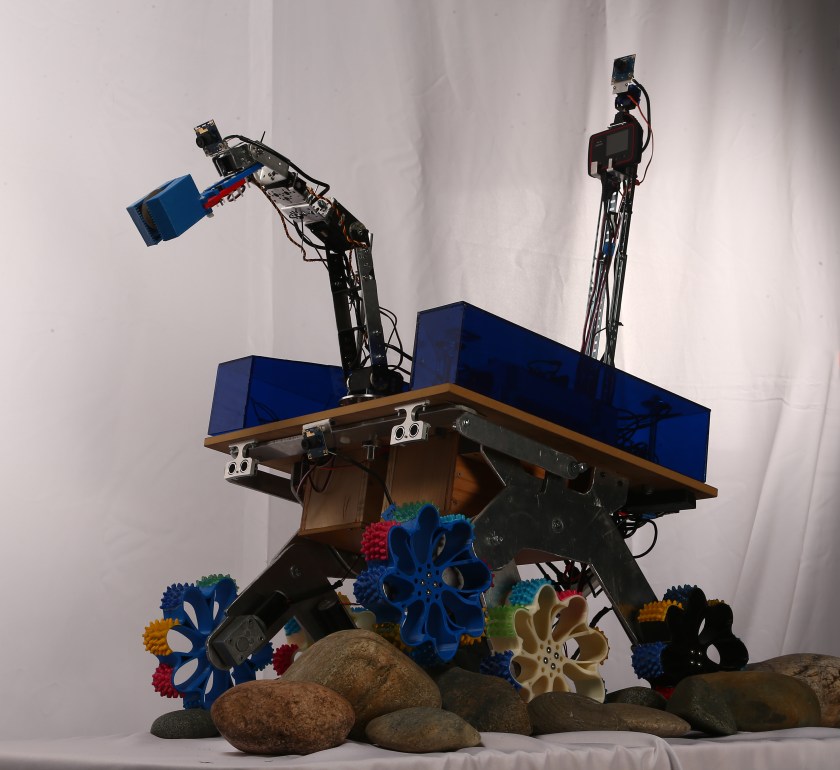
C.L.O.E.E. even had to run speed tests. We determined her speed to be about 1 foot/sec.
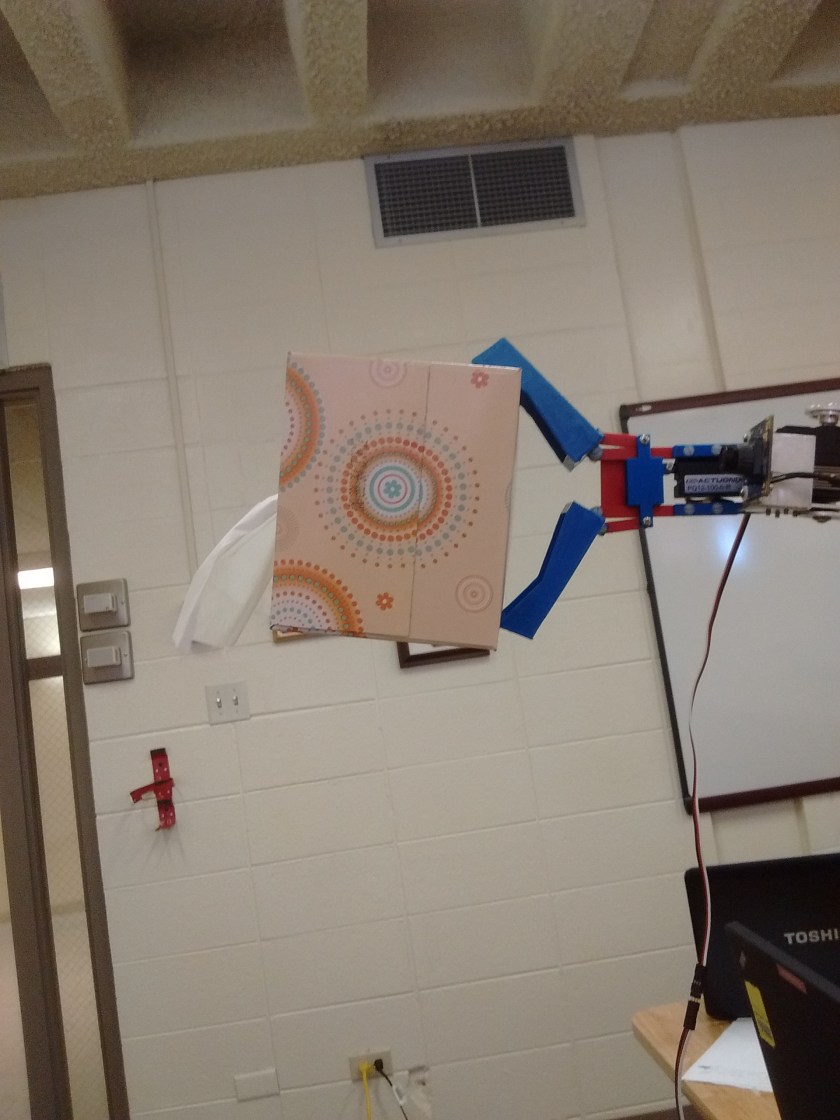
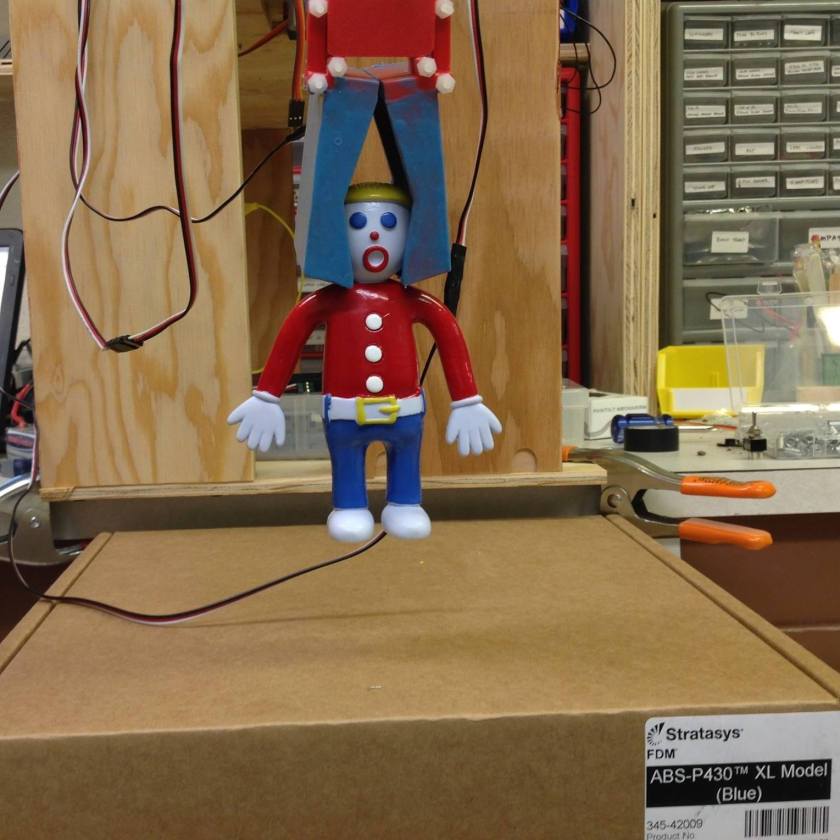
Additionally, we completed a rough build of the “mock arm”, a scaled replica of the C.L.O.E.E.’s real arm. The plan is for the real arm to mimic the movements of the mock arm, which will be controlled by the team member’s hands.